
PID飞控,但是Minecraft
写在前面
很早就想写一篇博客记录调pid时的感受与所悟了,但是由于是静态博客,没法留下视频,所以一直认为没法形象的讲述调参过程,也一直盼望着能有什么虚拟调参软件练手。谁曾想一款陪伴了我11年的沙盒居然能给我这个契机。
为了照顾没有了解过minecraft的朋友或者说没有玩过valkyrien模组与computercraft的玩家,我先大致的描述一下为什么选用它们成为我的虚拟调参平台吧。mc是一款自由沙盒建造游戏,世界由方块和实体构成,方块允许着玩家自由改动,创造出丰富多彩的世界,实体一般是生物,受到重力以及浮力等物理影响。
这其实就是在说,原版mc中玩家可自由改动非实体世界的往往都是没有物理属性的,你甚至能见到一大片陆地浮在空中。而革命性模组valkyrien则赋予了方块物理属性,从此,玩家可以自由地与物理的世界交互了。至于computercraft模组,你可以理解为提供了集陀螺仪,加速度计等元件为一身的单片机,支持以lua为脚本的程序烧写,除此之外,它还能对所在物理结构进行力的模拟。
至此,我们可以实时获取物理结构的速度、姿态,也能对其施加力,一个闭环系统就有实现的可能了。
在此,我需要感谢up主发烧的烧的个人空间-发烧的烧个人主页-哔哩哔哩视频 (bilibili.com)对我提供的帮助,在我遇到困难时无私地帮我解惑,尽管我们并不认识。
准备工作

- 先给出几个模组地址
modrinth.com/mod/kotlin-for-forge
Valkyrien Skies - Minecraft Mod (modrinth.com)
CC: Tweaked - Minecraft Mod (modrinth.com)
CC: VS - Minecraft Mod (modrinth.com)
- 再介绍下valkyrien模组与computercraft的兼容附属模组CC:VS的几个API
以下都用”飞船”称呼物理结构
ship.getVelocity() 获取飞船在世界坐标系下x,y,z轴的速度
ship.getQuaternion()获取飞船姿态四元数
ship.getMass()获取飞船质量
ship.getMomentOfInertiaTensor()获取飞船惯性矩
ship.applyRotDependentTorque()给飞船一个局部坐标系下x,y,z轴的扭矩
ship.applyInvariantForce()给飞船施加一个世界坐标系下x,y,z轴的力
ship.applyRotDependentForce()给飞船施加一个局部坐标系下x,y,z轴的力
有了这些API,只要写好姿态解算与PID,就能实现飞控了
姿态解算
什么是四元数
高中时其实就学过二元数a+bi,可以在二维复平面上表示任意旋转
那么处于三维平面中,我们是否可以一个三元数a+bi+cj来表达任意旋转呢?
目前广泛的说法: 三元数 - 维基百科,自由的百科全书 (wikipedia.org)
数学家哈密顿用了15年的时间都没找出正确的三元数形式,而是创造了四元数q=a+bi+cj+dk
使用球极投影的方式用四维空间中的旋转来表示三维中的旋转
四元数对向量的旋转作用
从四元数表示的旋转可以导出对应的旋转矩阵。给定一个单位四元数 q=w+xi+yj+zkq = w + xi + yj + zkq=w+xi+yj+zk,其对应的 3x3 旋转矩阵 R可以表示为:

假设我们有一个向量 v,使用四元数旋转矩阵R可以得到旋转后的向量 v′

1 | function RotateVectorByQuat(quat, v) |
四元数转欧拉角速度
四元数反映了在世界坐标系下姿态的一次旋转
先将x轴与z轴的单位向量以这次四元数进行旋转得XPoint与ZPoint
然后对上一次四元数的三个虚部取负数,即求共轭四元数,这表明了上一次四元数的逆旋转
再对XPoint与ZPoint进行这逆旋转即可得到两次旋转的差值,这个差值已经能反映姿态变化率了
我们将其转化为欧拉角
如图所示,请在脑海中相向它的转动与各个向量的分量所在
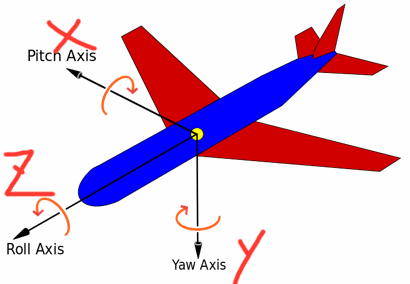
z向量是飞船头指向的轴,对它的y分量求反正弦函数可以算得俯仰角
x向量是分机翅膀所在的轴,同理我们也会通过它的y分量求滚转角
最后通过x向量的z分量与x分量的反正切求偏航角
1 | local function getEularRate(q) |
PID算法
什么是PID算法

可以举例来解释:我想控制飞船在x轴的前进速度为50,我能给飞船一个x轴正方向上的力F,pid算法实现的就是根据实时速度的反馈来计算F应该的大小是多少,使得实时速度最后控制在50
假设一个采样周期是t
比例参数p
1 | Fp = kp*Error |
力大小与误差成正比,且当速度比目标小的时候力为正值,当当速度比目标大的时候力为负值,其中kp是比例系数。
比如说当前实际速度为30,**并且假设给多大的力增加多大的速度(线性的且比例为1)*,此时误差为20,经过一个t后实际速度为30+20kp。
假设kp为0.5,那么下次的速度就是40,然后就是45,永远趋近与50而到不了50,这便是kp太小而导致的失调
假设kp为1.5,那么下次速度就是60,然后就是45,永远会在50附近震荡而到不了50,这便是kp太大而导致的超调
假设kp为1,那么下次速度正好是50,但是由于一些原因,这往往并不能实现系统的精确控制,而且诸如位置环来说力的大小与位置改变的关系并不是线性的,我们在下一个参数中接着讲
微分参数d
系统会有一定延时,在现实生活中,一个大小的力并不是瞬时就给上的,就算不在现实,哪怕是在虚拟中,指令执行也有一定延迟。具体例子就是,采样周期稍微比理想时间长点或短点,本该就会导致实际值落在50.00001或49.99999,这样仍然会有误差,从而导致震荡。
况且kp的适当增大能提升系统的响应速度,有时候些许的震荡总比所谓刚刚好的值带来的稳态误差要好(第三个参数时会讲到)
所以既然在单kp的情况下震荡出现往往不可避免,那么我们就要那么就必须引出下一项参数
1 | Fd = kd * dError/dt |
即这个力与误差的变化速度有关。假设目标速度不变,实际速度变大时误差减小,即误差变化速度为负,那么力为负;反之当实际速度变小时误差也减小,那么力为正。也就是说Fd是阻碍误差减小的力,误差减小的越快阻尼就越大。
由于误差减小的力始终受到一个阻尼,所以飞船速度震荡幅度会快速缩小
kd的失调就是并没有明显的缓解kp的震荡
而kd的超调可能会导致对误差的变化率过于敏感,从而放大误差的快速变化(如噪声),导致高频震荡
找一个明显缓解kp的低频震荡而不会产生高频震荡的值就是合适的kd值
积分参数i
上面两个参数在理想情况下已经能使飞船速度控制在50了,
虽然游戏中没有空气阻力,但是不代表游戏里没有其他干扰力,如果我们把刚刚探讨的轴换成y轴,就会出现一个重力开始影响系统
是想一个情况,假设现在飞船达到上升速度50还需要一个系统给的力为10,而飞船受到的重力恰好为10,那么就有一个尴尬的情况诞生了,飞船y轴合力始终为0,所以速度也不变,系统始终拥有一个稳定的误差使其无法达到50速度。
这便是稳态误差情况,解决的办法就是积分值
1 | Fi = ki * 积分号(Error)/dt |
只要误差存在,就不断地对误差进行积分,并反应在调节力度上。
这样当稳态误差发生时,还有个不断增大的力可以消除它
只不过参数ki的引入会带来积分过饱和等问题,在一些不那么需要精确控制的场合用PD控制器即可
ki的失调无法消除稳态误差’
ki的超调则会同样会产生震荡
PID实现飞行器
实际游玩中飞船的姿态精确性并不需要那么高,3以下的偏差往往可以接收,除了y轴上的重力影响要用到积分I之外,使用PD控制器完全能胜任大部分需求(其实y轴影响也没那么大啦,除了飞船会及其微小的向下掉),下面给出一个基本的PID控制器的写法,其中max用于对系统进行限幅,防止输出过大值(不过游戏中实测没啥必要)
1 | function PIDController(kp, ki, kd, setpoint, measurement, prev_error, integral,max) |
世界坐标系下的x,y,z轴速度闭环
很简单,不赘述了
1 | function setShipWorldVelo(x,y,z) |
局部坐标系下的x,y,z轴速度闭环
通过
1 | function RotateVectorByConjugateQuat(q, v) |
得到局部坐标系速度,这样才可以和applyRotDependentForce做闭环
1 | function setShipRotVelo(x,y,z) |
局部坐标系的x,y,z轴角速度闭环
姿态解算上面说过了,拿到角速度自然就能做闭环了
1 | function setShipOmega(r,p,y) |
形状与质量适配
这部分内容已经出现在上面的代码中,现在详细解释下:
F = Ma
其实与其把速度环系统的输出看成力,不如看成加速度,这样只要在输出乘上API拿取的飞船质量M即可适应任何质量的飞船
τ=I α , 这个公式指扭矩(可以看成专门对旋转的一个作用)的大小等于惯性矩的大小乘上加速度
这下可能有人要释怀的笑了:因为旋转与质量无关,这个公式又几乎与上面的牛顿第二定律相似
飞船形状影响着惯性矩,惯性矩又反映了旋转的难易程度,我们完全可以把角速度环的输出看成加速度,这样在输出时乘上API拿到的惯性矩,此时即可适应任何形状的飞船
后记
可以尝试的后序过程:结合之前写的Boids算法在mc中实现蜂群无人机,想想就很酷
文章写的很累,可能会有些小漏洞,遇到奇怪的地方请见谅
链接推荐:
- 控制器模组:Create: Tweaked Controllers - Minecraft Mod (modrinth.com)
- CC模组文档:CC: Tweaked
- 我的代码仓库地址:varkyrien_cc_ship
- Title: PID飞控,但是Minecraft
- Author: TangSong404
- Created at : 2024-06-16 00:00:00
- Updated at : 2025-03-31 00:01:47
- Link: https://www.tangsong404.top/2024/06/16/fun/pid_minecraft/
- License: This work is licensed under CC BY-NC-SA 4.0.